Controller Area Network
Created: 2021-12-11 22:56:28
Modified: 2021-12-12 20:51:29
CAN Bus
1 简介
用于多设备通信。
目前包括ISO 11898-2(高速度CAN)和ISO 11898-3(低速/容错CAN)两个主要标准。
特点:复用通信线缆,多主机串行总线标准,消息传递协议,信息导向传输协定的广播机制(Broadcast Communication Mechanism)。
优点:增加节点而不用在现有软、硬件上做出调整;不基于特殊种类的节点。
2 硬件 物理层
节点和总线。
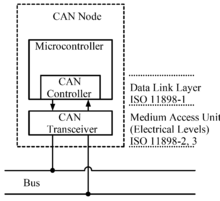
节点:即设备,包括ECU(传感器、驱动器等控制设备)、网关(与计算机连接)等。
节点的CAN相关硬件组成:MCU、CAN Controller、CAN Transceiver。
CAN Transceiver:转换逻辑电平(来自CAN Controller)和差分信号电平(兼容CAN Bus)。
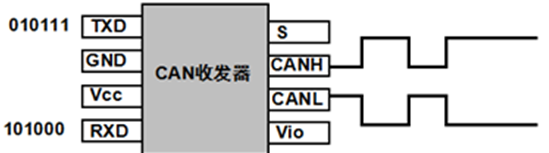
ps. 从隐性信号(1)向显性信号(0)过渡的速度更快,因为此时CAN线缆被主动积极地驱动。显性向隐性的过渡速度主要取决于CAN网络的长度和导线的电容。
2.1 ISO 11898-2
总线:两根平行电线(CAN_H和CAN_L),双绞线,串终端阻抗(120Ω,电缆的特性阻抗为120Ω,为了模拟无限远的传输线,抑制信号反射,同时可以使总线电压回到隐性状态或者闲置状态)。
多主机与广播。
差分信号:不归零(NRZ)格式。
半双工:在一个主机上收发不同时进行。
波特率。
3 传输层
CAN标准主要体现在总线上。
消息帧:帧起始、仲裁段、CRC、ACK等。
帧起始:同步。
仲裁段:信息标识符(Message Identifier,每个标志符在整个网络中独一无二)表示优先级,实现无损位仲裁机制。
筛选。
邮箱。
5 应用
70个电子控制器(ECU)间通信